今回は、トラクターなどの作業車両に関する発明を紹介します。今日も一緒に勉強しましょう。
従来、作業をした部分と作業をしなかった部分との端部がきれいに揃わないという問題があります。
この発明では、非作業指令と作業指令を出すタイミングを車速等に基づいて制御します。これにより、作業をした部分と作業をしなかった部分との端部をきれいに揃えることができます。
作業をした部分と作業をしなかった部分との端部がきれいに揃わない
トラクターなどの作業車両が自律走行しながら作業するシステムがあります。例えば、畑を往復しながら畑の全体をくまなく耕す作業をします。
このとき、作業をする状態と作業をしない状態とを切り替えながら走行することがあります。
しかし、作業をする状態と作業をしない状態とを切り替えるタイミングが適切でないと、作業をした部分と作業をしなかった部分との端部がきれいに揃わないことがあるという問題があります。
非作業指令と作業指令を出すタイミングを車速等に基づいて制御
この発明の作業車両は、自律走行をする作業車両で、作業をした部分と作業をしなかった部分との端部をきれいに揃えることができます。
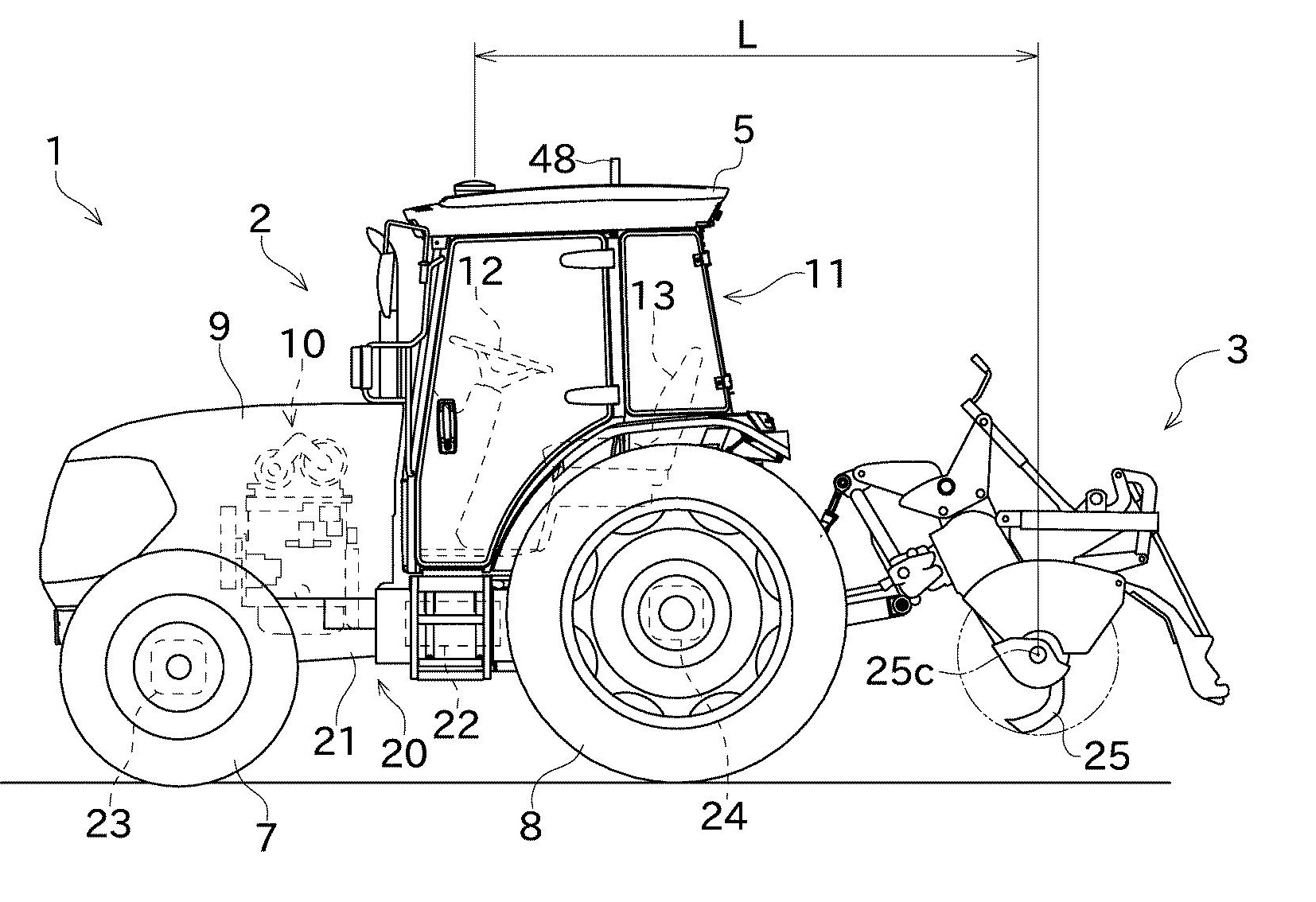
作業車両は、例えばトラクターで、ロータリ耕耘機を搭載しています。作業時にはロータリ耕耘機を下げた状態(作業状態)をとり、非作業時にはロータリ耕耘機を上げた状態(非作業状態)をとります。
作業車両は、作業状態から非作業状態に切り替える「非作業指令」を出力するタイミングを、作業状態の車速と、非作業状態に切り替える位置までの距離とに基づいて制御します。
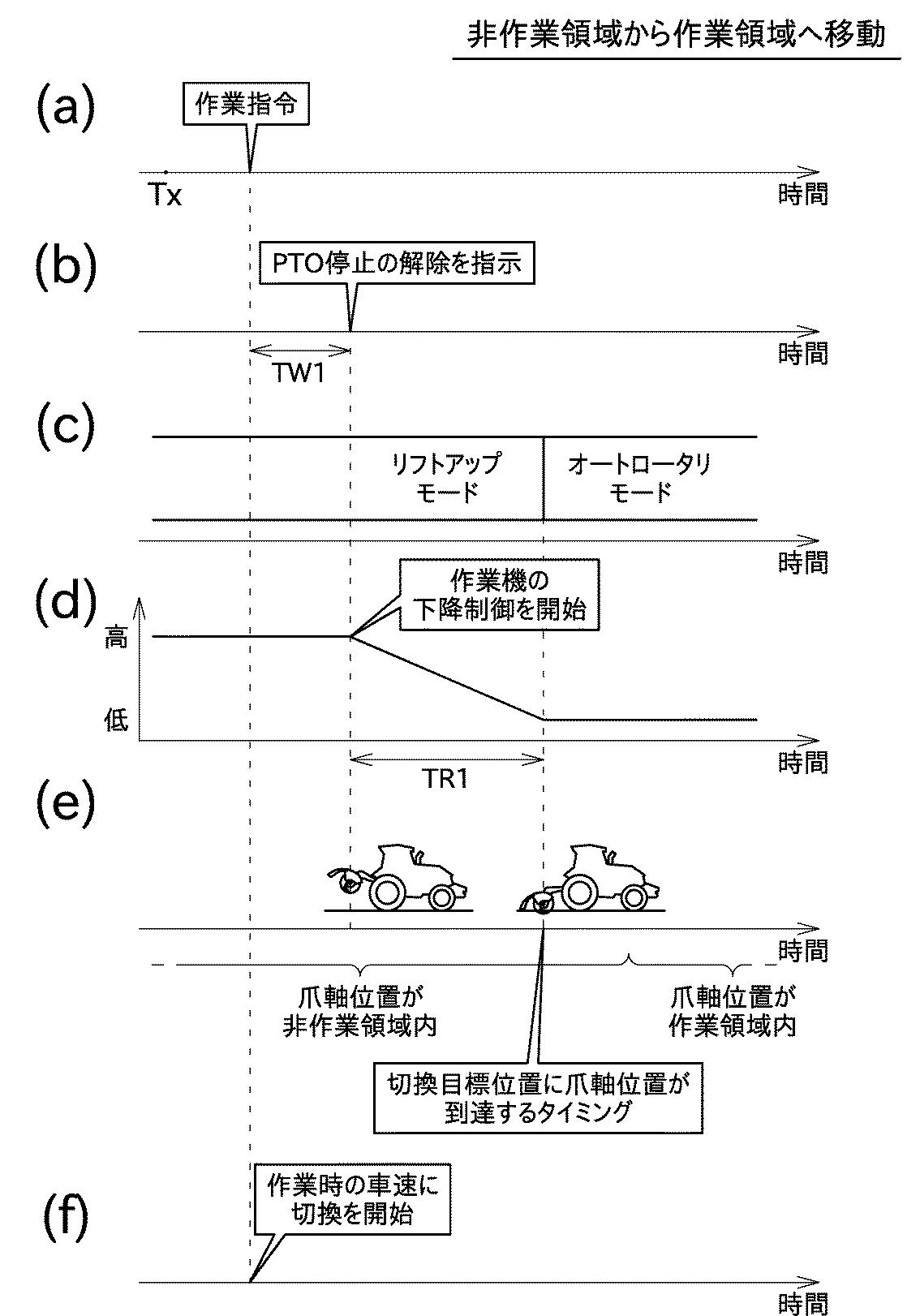
また作業車両は、非作業状態から作業状態に切り替える「作業指令」を出力するタイミングを、非作業状態の車速と、車速の変化率と、作業状態に切り替える位置までの距離とに基づいて制御します。
このようにすることで、作業状態から非作業状態に切り替えるタイミングと、非作業状態から作業状態に切り替えるタイミングとをきちんと制御して、作業をした部分と作業をしなかった部分との端部をきれいに揃えることができます。
特許第6663382号 ヤンマー株式会社
出願日:2018年3月2日 登録日:2020年4月6日
作業車両において、作業機で作業体が実際に作業を行う位置を考慮して、作業体が作業を行う状態と、そうでない状態とを良好に切換制御する。
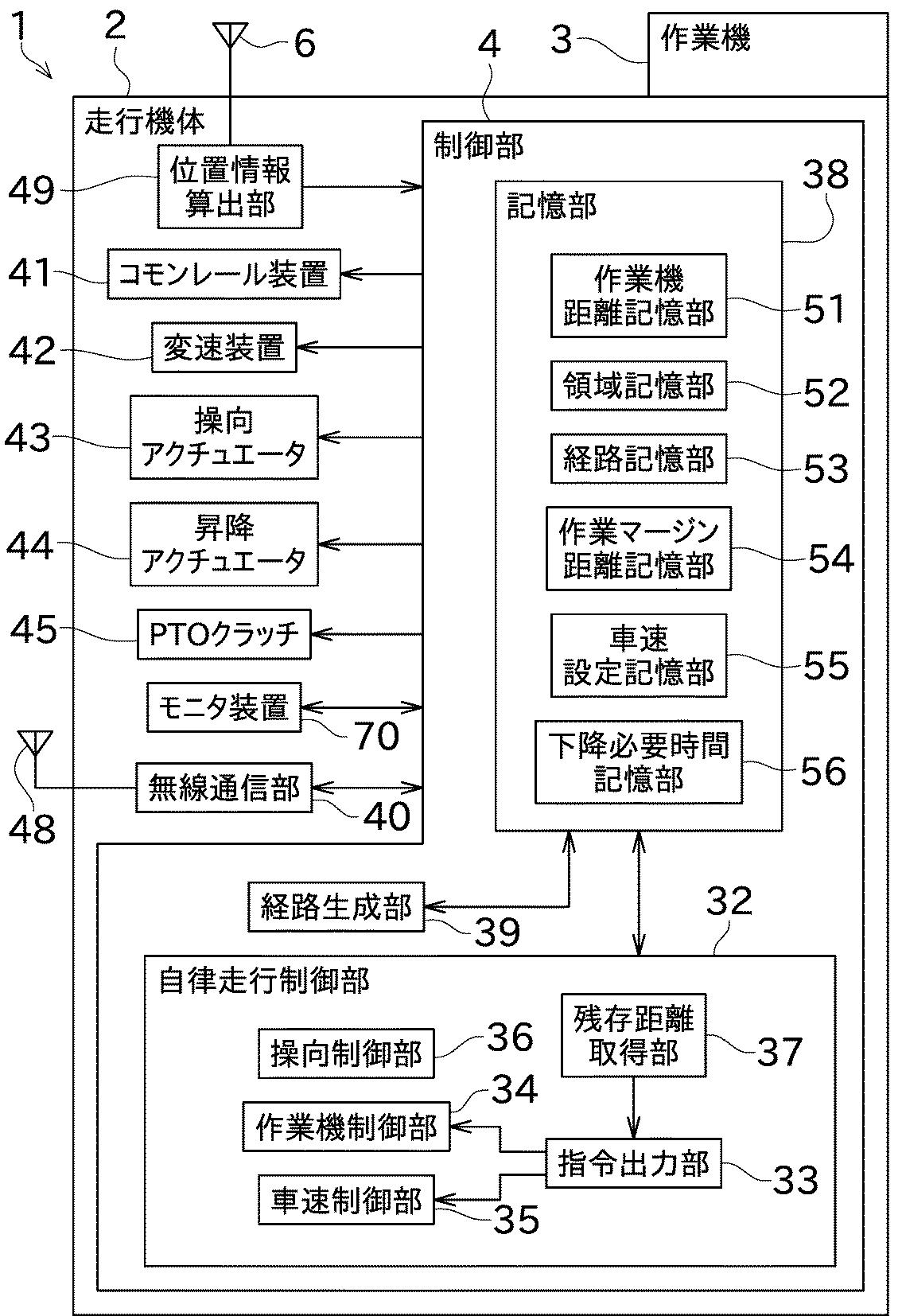
【請求項1】
作業機を装着可能な車体部と、
前記作業機を作業状態に制御する作業指令及び前記作業機を非作業状態に制御する非作業指令を出力する指令出力部と、
前記作業指令又は前記非作業指令に応じて前記作業機の作業状態を制御する作業機制御部と、
作業車両の車速を切換制御可能な車速制御部と、
前記作業機制御部による制御によって前記作業機の作業状態が切り換えられる基準位置を設定する設定部と、
前記作業機の作業中心位置から前記基準位置までの距離を取得する距離取得部と、
を備え、
前記車速制御部は前記非作業指令に応じて前記作業車両の車速を第1車速から第2車速に切り換えるとともに、前記作業指令に応じて前記作業車両の車速を前記第2車速から前記第1車速に切り換え、
前記指令出力部は、
前記第1 車速と前記距離とに基づいて非作業指令の出力タイミングを制御し、
前記第2 車速と、前記第2 車速から前記第1 車速への速度変化率と、前記距離と、に基づいて、前記作業指令の出力タイミングを制御することを特徴とする作業車両。
今日のみどころ
自律走行するトラクターなどの作業車両に関する発明で、作業のできあがりをきれいに整えることができます。
農業機械も自律走行しながら作業をするというようにハイテクになってきています。農業の人手不足解消に貢献できそうな発明です。