今回は、対話ロボットの制御に関する発明を紹介します。今日も一緒に勉強しましょう。
従来、ロボットの位置を把握せずに動作指示すると、本来と違う動作になるという問題があります。
この発明では、動作指示に従って動作させると可動範囲を超えてしまう場合には、動作の基準点(仮原点)を移動させて、可動範囲を超えないようにします。これにより、本来意図した動作をロボットにさせることができます。
ロボットの位置を把握せずに動作指示すると、本来と違う動作になる問題
従来、ユーザと対話する対話ロボットがあります。対話ロボットは、首をふったり、手を動かしたりする動作をしながらユーザと対話します。
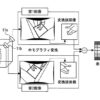
ロボットの動きを制御する機能は、ロボット自身がもつ場合もあるし、ロボットとは異なる制御コンピュータがもつ場合もあります。
制御コンピュータがロボットの動きを制御する場合、制御コンピュータがロボットの現在位置を把握せずに動作指示を出す場合があります。その場合、ロボットに本来させたい動作をさせることができないという問題があります。
動作指示に従って動作させると可動範囲を超えてしまう場合には仮原点を移動
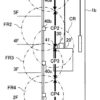
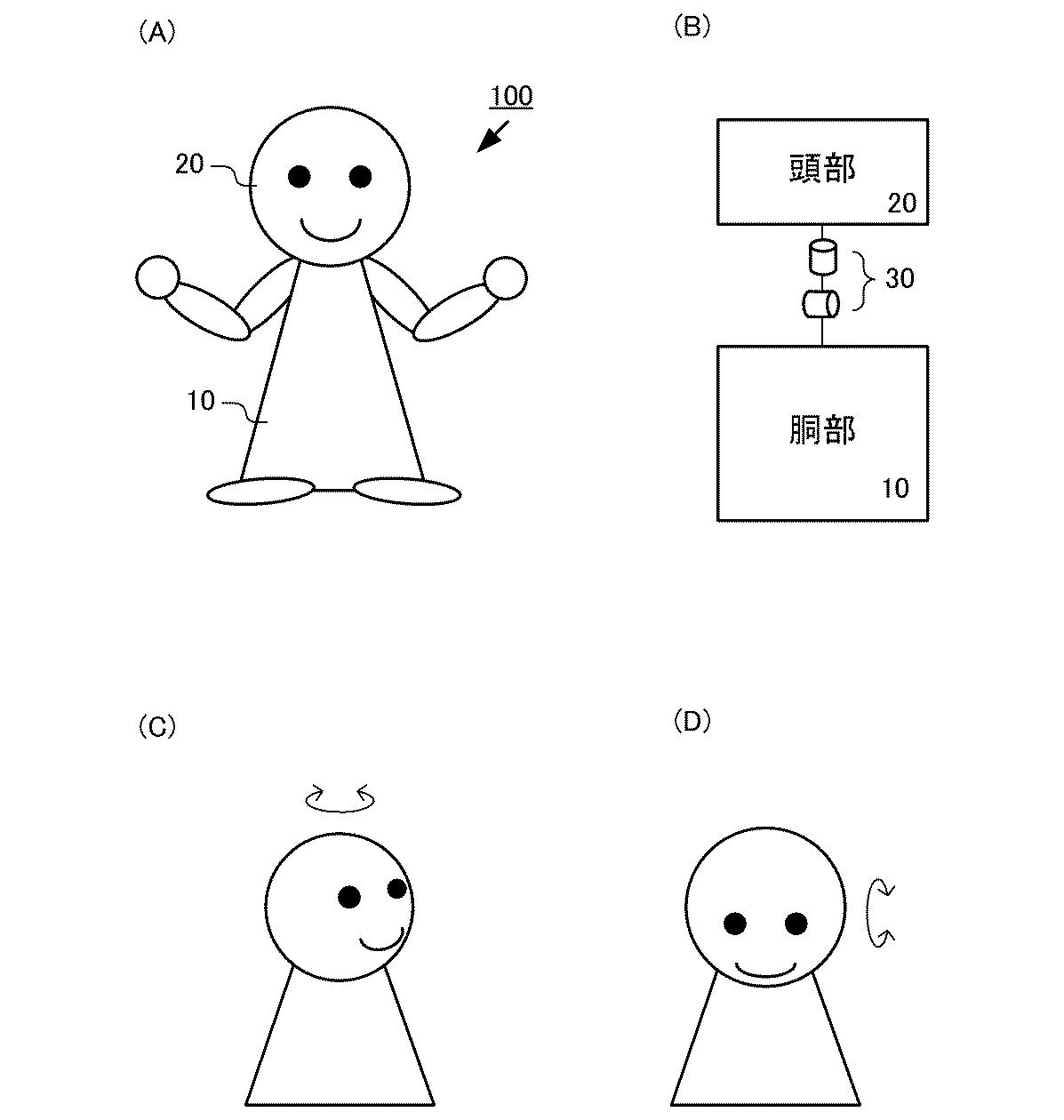
この発明の対話ロボットは、ユーザに追従して動く可動部をもっています。例えば、対話ロボットは、人型のロボットで、ユーザがいる方向に顔を向けるように首を動かしたり、手や足を動かしたりする例があります。
対話ロボットは、動作指示を受けたときに、その動作指示に従って可動部を動かすことで動作をします。
可動部を動かす際には、あらかじめ、可動部の動作の基準である「仮原点」を設定します。
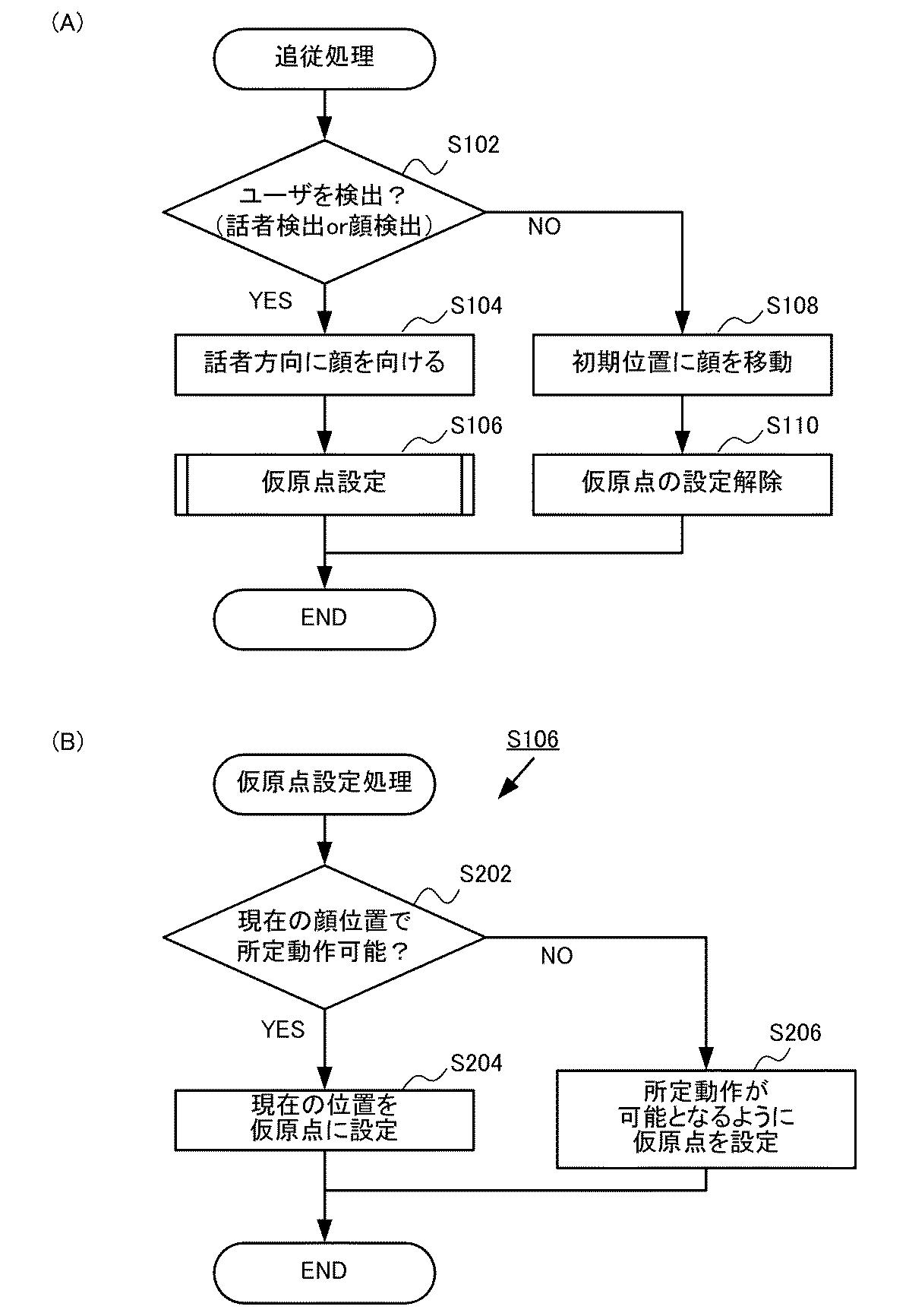
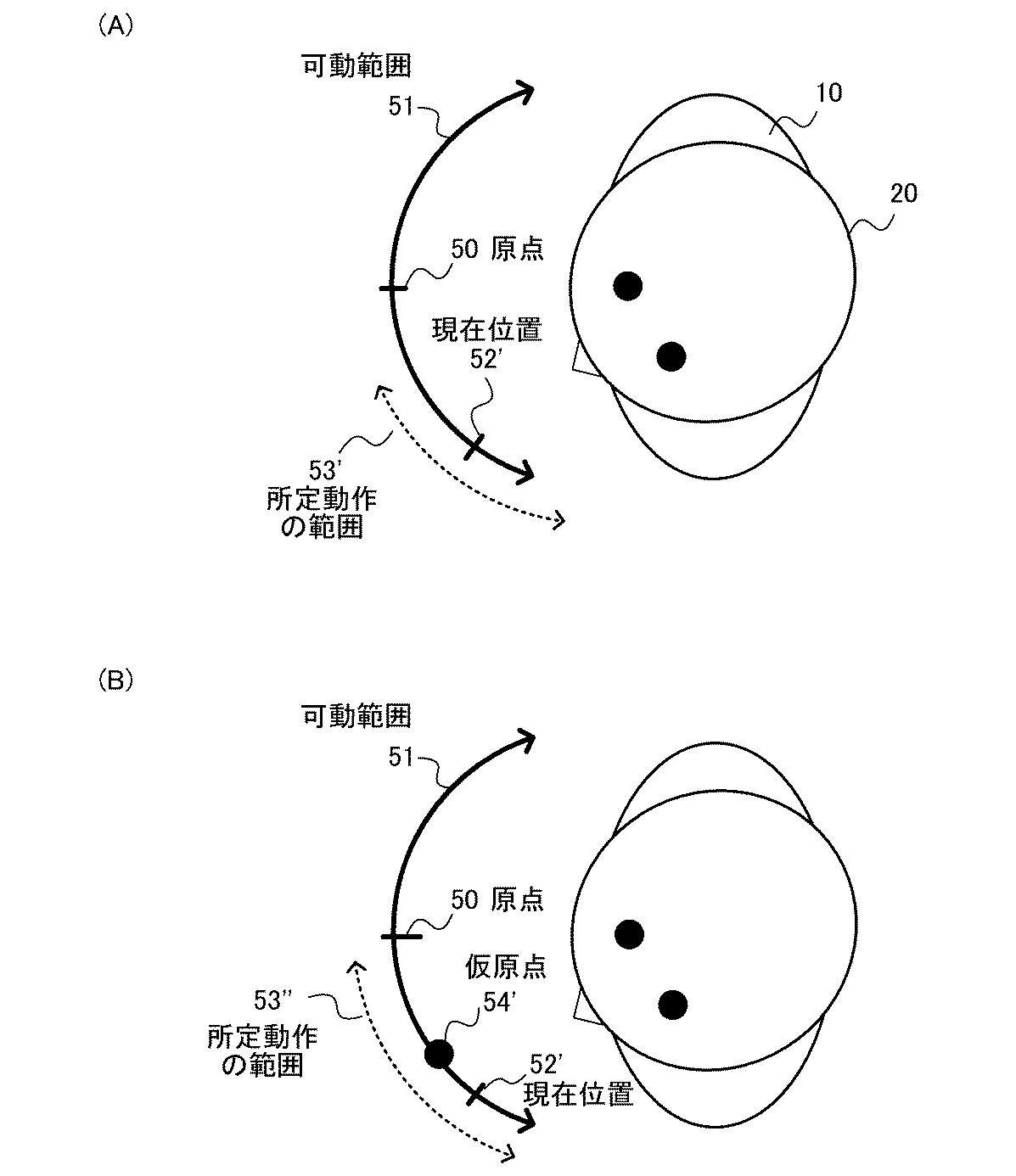
仮原点は、指示された動作を可動部がするときに、可動部の可動範囲を超えない場合には、現在の位置に設定されます。この場合、ロボットは、現在の位置を初期位置として動作します。
また、仮原点は、可動部が指示された動作をするときに可動範囲を超える場合には、その動作をしても可動範囲を超えないような位置に設定されます。この場合、ロボットは、現在の位置とは異なる位置を初期位置として動作します。
このようにして、ロボットは、可動範囲を超えないように動作をすることができるので、本来意図した動作をすることができます。
特許第6610609号 トヨタ自動車株式会社
出願日:2017年4月27日 登録日:2019年11月8日
可動部の動作状況を把握しない外部装置からの動作指示を受け付けた場合であっても、指示された動作を適切に実行可能とする。
【請求項1】
ユーザと音声対話を行う音声対話ロボットであって、
本体と、
前記本体に対して相対的に移動可能な可動部と、
前記可動部がユーザに追従するように前記可動部を移動させる追従制御部と、
前記追従制御部による前記可動部の移動に応じて、前記可動部の仮原点を設定する仮原点設定部と、
前記可動部の動作指示を取得する取得部と、
前記仮原点を基準として、前記動作指示にしたがって前記可動部を移動させる動作実行部と、
を備え、
前記追従制御部は、前記可動部が前記ユーザの方向を向くように前記可動部を移動させ、
前記仮原点設定部は、前記追従制御部による移動後の前記可動部の現在位置を基準として前記可動部に所定の動作を行わせても前記可動部の可動範囲を超えない場合には、前記現在位置を前記仮原点として設定し、
前記追従制御部による移動後の前記可動部の現在位置を基準として前記可動部に前記所定の動作を行わせると前記可動部の可動範囲を超える場合は、前記所定の動作が前記可動範囲に入るように前記仮原点を設定する、
音声対話ロボット。
今日のみどころ
対話ロボットの動作の制御に関する特許発明です。可動範囲を超えそうなら、可動範囲を超えないように原点を動かす、というのがキモとなるアイデアで、かなりシンプルです。
シンプルすぎて特許とれないんじゃないかと思って出願するのをためらうこともあると思いますが、こういうところをちゃんと発明と認識して特許出願するのがよいですね。